Two-Strain Tuberculosis Optimal Control Problem
The two-strain tuberculosis optimal control problem is stated as follows. Minimize the cost functional $$
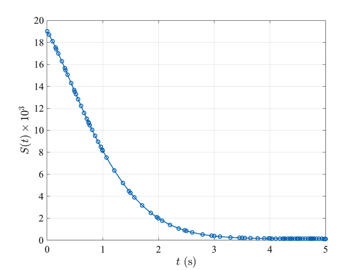
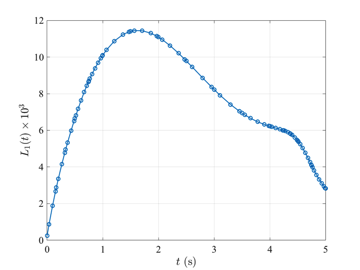
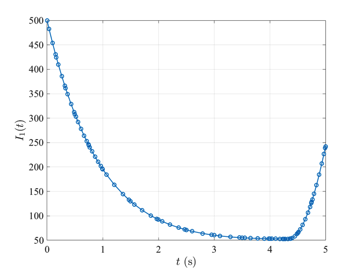
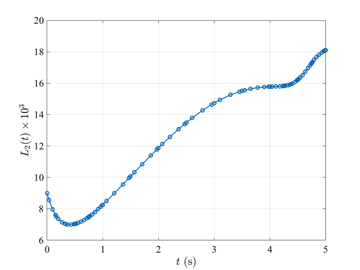
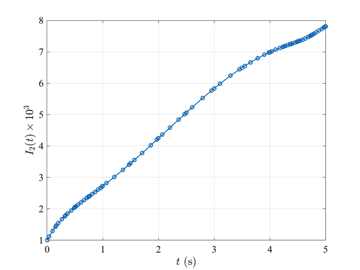
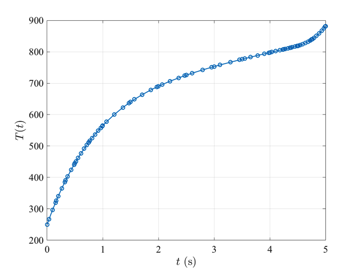
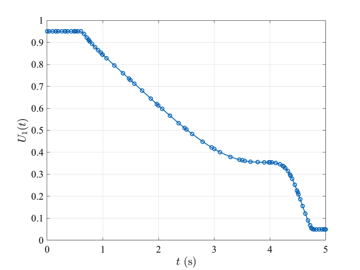
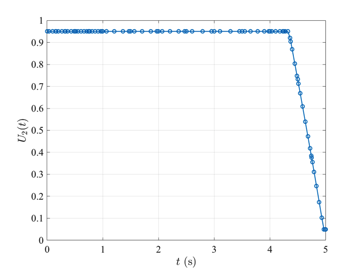
J = \int_0^{t_f} \left(\scriptsize L_2(t) + I_2(t) + \textstyle\frac{1}{2} B_1 u_1^2(t) + B_2 u_2^2(t)\right)dt$$ subject to the dynamic constraints $$ \begin{array}{lcl} \dot{S}(t) & = & \Lambda - \beta_1 S\frac{I_1 (t)}{N} - \beta^* S\frac{I_2 (t)}{N} - \mu S (t), \\ \dot{L}_1 (t) & = & \beta_1 S (t)\frac{I_1 (t)}{N} - (\mu + k_1)L_1 (t) - u_1 r_1L_1 (t) \\
& + & (1-u_2 (t))p r_2 I_1 (t) +\beta_2 T (t) \frac{I_1 (t)}{N} - \beta^* L_1 (t) \frac{I_2 (t)}{N}, \\
\dot{I}_1 (t) & = & k_1 L_1 (t) - (\mu + d_1) I_1 (t) - r_2 I_1 (t), \\ \dot{L}_2 (t) & = & (1-u_2 (t)) q r_2 I_1 (t) - (\mu + k_2) L_2 (t) \\ & + & \beta^* (S (t)+L_1 (t) + T (t))\frac{I_2 (t)}{N}, \\ \dot{I}_2 (t) & = & k_2 L_2 (t) - (\mu+d_2)I_2 (t), \\ \dot{T}(t) & = & u_1 (t) r_1 L_1 (t) - (1-(1-u_2 (t)))(p+q)r_2 I_1 (t) \\ & - & \beta_2 T (t) \frac{I_1 (t)}{N} - \beta^* T (t) \frac{I_2 (t)}{N} - \mu T (t), \end{array}$$ the state equality path constraint $$\\ S + L_1 + I_1 + L_2 + I_2 + T - N = 0, $$ and the initial conditions $$\begin{array}{lcd} S(0) & = & S_0, \\ L_1(0) & = & L_{10}, \\ L_2(0) & = & L_{20}, \\ I_1(0) & = & I_{10}, \\ I_2(0) & = & I_{20}, \\ T(0) & = & T_{20}. \end{array}$$ The solution to the two-strain tuberculosis optimal control problem using GPOPS-II is shown in the figures below.