Maximum Range of a Hang Glider
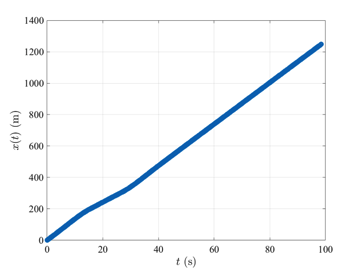
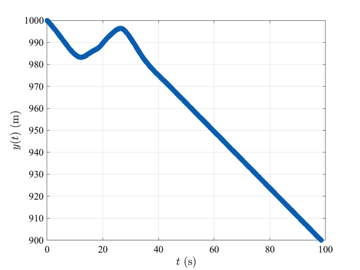
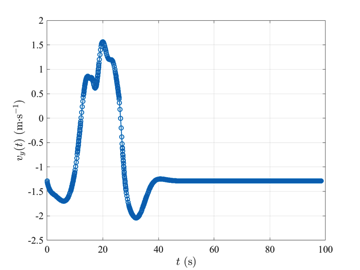
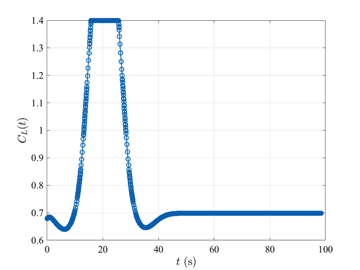
The maximum range of a hang glider optimal control problem is stated as follows. Minimize $$J=-x(t_f)$$ subject to the dynamic constraints $$\begin{array}{lcl}\dot{x} & = & v_x, \\ \dot{y} & = & v_y, \\ \dot{v}_x & = & -L s_N -D c_N, \\ \dot{v}_y & = & L c_N - D s_N -g, \end{array}$$ the boundary conditions $$\begin{array}{lcrclcr} x(0) & = & 0 & , & x(t_f) & = & \textrm{Free}, \\ y(0) & = & 0 & , & y(t_f) & = & 900, \\ v_x(0) & = & 13.2275675 & , & v_x(t_f) & = & 13.2275675, \\ v_y(0) & = & -1.28750052 & , & v_y(t_f) & = & -1.28750052, \end{array}$$ and the control inequality path constraint $$ 0\leq C_L \leq 1.4,$$ where $$\begin{array}{lclclcl} s_N & = & \displaystyle \frac{V_y}{v_r} &, & c_N & = & \displaystyle \frac{v_x}{v_r}, \\ V_y & = & v_y - u_A &, & u_A & = & u_M (1-X\exp(-X)), \\ X & = & (e-5/2)^2 & , & e & = & \displaystyle \frac{x}{R}, \\ L & = & \displaystyle \frac{q S C_L}{m} & , & D & = & \displaystyle \frac{q S C_D}{m}, \\ q & = & \frac{1}{2}\rho v_r^2 & , & v_r & = & \sqrt{v_x^2 + v_y^2}, \\ C_D & = & C_{D0} + K C_L^2 \end{array}$$