
Robot Arm Problem
The reusable launch vehicle optimal control problem is stated as follows. Maximize the cost functional $$J=t_f$$ subject to the dynamic constraints $$\begin{array}{lclclcl}\dot{y}_1 & = & y_2 & , & \dot{y}_2 & = & u_1/L, \\ \dot{y}_3 & = & y_4 & , & \dot{y}_4 & = & u_2/I_\theta, \\ \dot{y}_5 & = & y_6 & , & \dot{y}_6 & = & u_3/I_\phi, \end{array}$$ the control inequality constraints $$ -1 \leq u_i \leq 1, \quad (i=1,2,3),$$ and the boundary conditions $$\begin{array}{lclclcl} y_1(0) & = & 9/2 & , & y_1(t_f) & = & 9/2, \\ y_2(0) & = & 0 & , & y_2(t_f) & = & 0, \\ y_3(0) & = & 0 & , & y_3(t_f) & = & 2\pi/3, \\ y_5(0) & = & \pi/4 & , & y_5(t_f) & = & \pi/4, \\ y_6(0) & = & 0 &, & y_6(t_f) & = & 0, \end{array}$$ where $$\begin{array}{lcl} I_\theta & = &\displaystyle \frac{(L-y_1(t))^3 + y_1^3}{3}\sin^2(y_5(t)), \\ I_\phi & = & \displaystyle\frac{(L-y_1(t))^3 + y_1^3(t)}{3}, \\ L & = & 5. \end{array}$$ The solution to the robot arm optimal control problem using GPOPS-II is shown in the figures below.

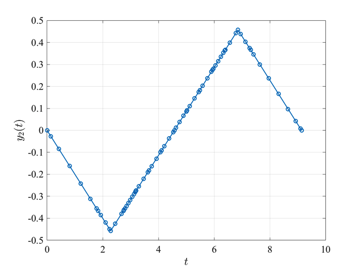


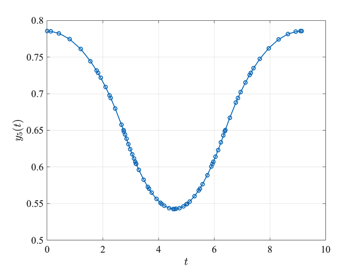



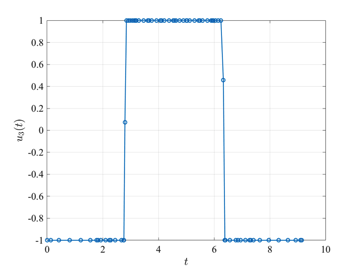
Image Courtesy of NASA.
