
Low-Thrust Orbit Transfer
The low-thrust orbit transfer optimal control problem is stated as follows. Minimize the cost functional $$J=-w(t_f)$$ subject to the dynamic constraints $$\begin{array}{lcl}\dot{p} & = & \displaystyle \sqrt{\frac{p}{\mu}}\frac{2p}{q}\Delta_\theta, \\ \dot{f} & = & \displaystyle\sqrt{\frac{p}{\mu}}\left[\sin L~\Delta_r + \frac{1}{q}\left((q+1)\cos L + f \right)\Delta_\theta - \frac{g}{q}\left(h\sin L - k\cos L\right)\Delta_h\right], \\ \dot{g} & = & \displaystyle\sqrt{\frac{p}{\mu}}\left[-\cos L~\Delta_r + \frac{1}{q}\left((q+1)\sin L + g \right)\Delta_\theta + \frac{f}{q}\left(h\sin L - k\cos L\right)\Delta_h\right], \\ \dot{h} & = & \displaystyle\sqrt{\frac{p}{\mu}}\frac{s^2\cos L}{2q}\Delta_h, \\ \dot{k} & = & \displaystyle\sqrt{\frac{p}{\mu}}\frac{s^2\sin L}{2q}\Delta_h, \\ \dot{L} & = & \displaystyle\sqrt{\frac{p}{\mu}}\left(h\sin L - k \cos L\right)\Delta_h + \sqrt{\mu p}\left(\frac{q}{p}\right)^2, \\ \dot{m} & = &\displaystyle -\frac{T}{V_e}, \end{array}$$ the control equality path constraint $$u_r^2+u_t^2+u_h^2=1,$$ the initial conditions $$\begin{array}{lclclcl} p(t_0) & = & a_0(1-e_0^2) & , & h(t_0) & = & \tan(i_0/2)\sin\Omega_0, \\ f(t_0) & = & e_0\cos(\omega_0+\Omega_0) & , & k(t_0) & = & \tan(i_0/2)\cos\Omega_0, \\ g(t_0) & = & e_0\sin(\omega_0+\Omega_0) & , & L(t_0) & = & \Omega_0 + \omega_0 + \nu_0, \end{array}$$ and the terminal conditions $$\begin{array}{lcl} p(t_f) & = & a_f(1-e_f^2), \\ f^2(t_f) + g^2(t_f) & = & e_f^2, \\ h^2(t_f) + k^2(t_f) & = & \tan^2(i_f/2), \\ f(t_f)h(t_f)+g(t_f)k(t_f) & = & e_f\tan(i_f/2)\cos\omega_f, \\ g(t_f)h(t_f) - k(t_f)f(t_f) & \leq & e_f\tan(i_f/2)\sin\omega_f. \end{array}$$ The solution to the low-thrust orbit transfer optimal control problem obtained using GPOPS-II with the NLP solver IPOPT is shown in the figures below.
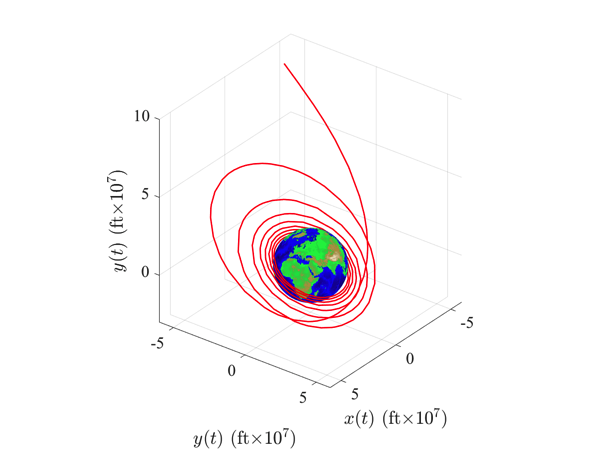
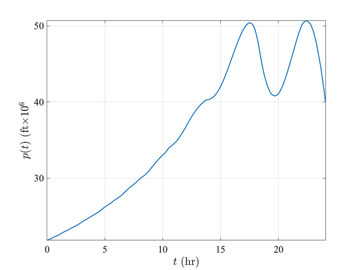
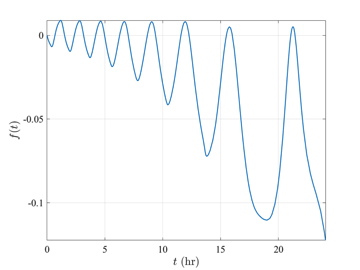


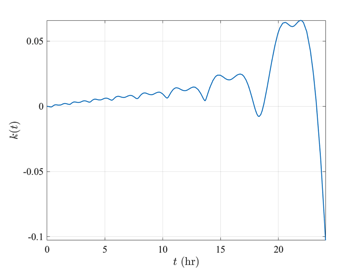
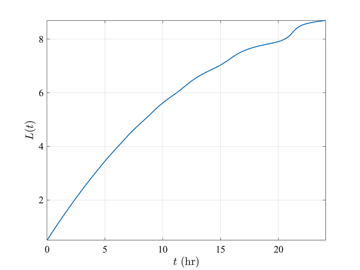

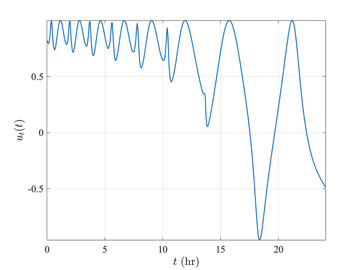
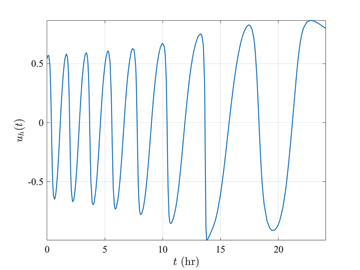
Image Courtesy of NASA.
